

دانلود پروژهHierarchical Task Network Planning AI v1.11.1 برای آنریل انجین
Unreal Engine - Hierarchical Task Network Planning AI (5.1)
پروژه Hierarchical Task Network Planning AI
پروژه Hierarchical Task Network Planning AI برای آنریل انجین : با این پروژه می توانیدهوش مصنوعی ایجاد کنید که بتواند از قبل با استفاده از این جایگزین انعطافپذیر و کاملاً ویژه برای رفتار درختی برنامهریزی کند ، درست مانند رفتار درختی می توانید به راحتی Tasks، Decorators و Services را از ++C یا Blueprints ایجاد کنید و آنها را در یک ویرایشگر نمودار بصری مرتب کنید ، این پروژه رو از سایت Unreal Engine برای کابران سافت ساز حاضر کردهایم ، با سافت ساز همراه باشید.

عنوان : Unreal Engine – Hierarchical Task Network Planning AI (5.1)
فرمت : uasset umap
کاتالوگ : ندارد
موضوع : پروژه آنریل انجین
شرکت سازنده : Unreal Engine
Unreal Engine – Hierarchical Task Network Planning AI (5.1)
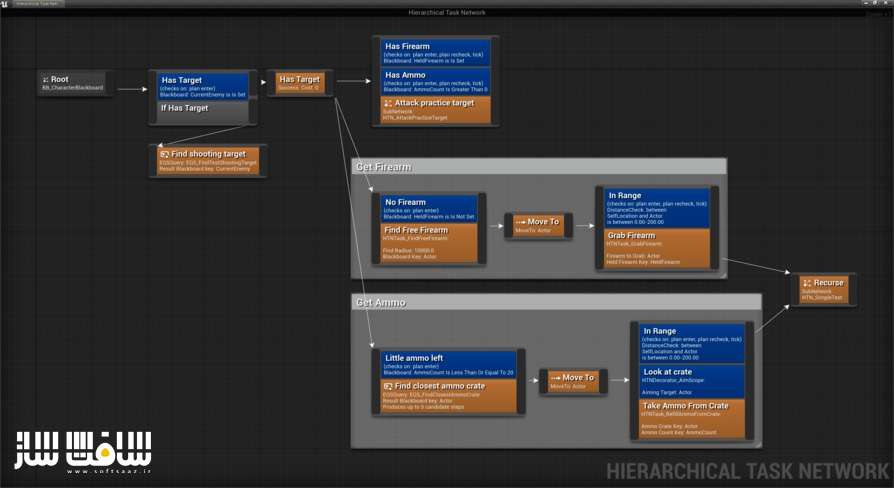
The HTN Planning plugin lets you create AI that can plan multiple steps ahead by predicting the consequences of its actions.
Just like with Behavior Trees, you can easily create Tasks, Decorators, and Services from either C++ or Blueprints, and arrange them in a visual graph editor. The HTN planner uses Blackboard data to store knowledge about possible future worldstates. Nodes check and modify values in the worldstate during planning, which makes it possible to make decisions based on possible future states. The planner efficiently finds the plan with the lowest cost, or the one with the highest priority.
Compared to other planning techniques like Goal-Oriented Action Planning, HTN planning is more efficient and gives designers much more control over the AI. It can be as rigid as Behavior Trees, or as flexible as GOAP. You can create AI with just as much autonomy and flexibility as you need: an AI that selects between predefined sequences of tasks, or an AI that is free to arrange its tasks in any order to achieve a goal, or anything in between.
Features:
Node-based HTN graph editor
Seamlessly use Blackboard data as worldstate
Make custom Tasks, Decorators, and Services in both C++ and Blueprints
Create composable behaviors using subnetworks
Make subplans within plans to freely mix planning and on-the-fly decision-making
Cost-based or priority-based planning
Parallel planning
Any-order planning
Integration with the Visual Logger, including visualizing the current plan
Integration with the Environment Query System for complex movement planning and decision-making
Realtime debugging features
Extend the HTN Component with HTN Extensions
Full source code access
حجم کل : 129 مگابایت

برای دسترسی به کل محتویات سایت عضو ویژه سایت شوید
برای نمایش این مطلب و دسترسی به هزاران مطالب آموزشی نسبت به تهیه اکانت ویژه از لینک زیر اقدام کنید .
دریافت اشتراک ویژه
مزیت های عضویت ویژه :
- دسترسی به همه مطالب سافت ساز
- آپدیت روزانه مطالب سایت از بهترین سایت های سی جی
- ورود نامحدود کاربران از هر دیوایسی
- دسترسی به آموزش نصب کامل پلاگین ها و نرم افزار ها
اگر در تهیه اشتراک ویژه مشکل دارید میتونید از این لینک راهنمایی تهیه اشتراک ویژه رو مطالعه کنید . لینک راهنما
For International user, You can also stay connected with online support. email : info@softsaaz.ir telegram : @SoftSaaz
امتیاز دهی به این مطلب :
امتیاز
لطفا به این مطلب امتیاز دهید



